Numerical algorithms that employ a potential constraint strategy need to prove convergence. Here, the potential set strategy has been integrated into the Constrained Steepest Descent (CSD) algorithm, which has been proven to converge to a local minimum at every point. Therefore, it has been proven that using the potential set strategy converges to a local minimum from various points.
In this post, I aim to calculate the search direction using the potential set strategy and compare it with cases where it's not used.
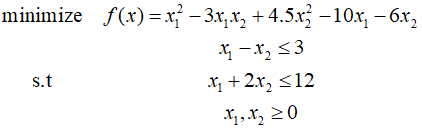
Let's calculate the search direction at the point $(4,4)$ using the potential set strategy and without using it, setting $\varepsilon = 0.1$.
The constraints in standardized normal form can be written as follows.

Calculating the function value and gradient at the point $(4,4)$ results in the following.
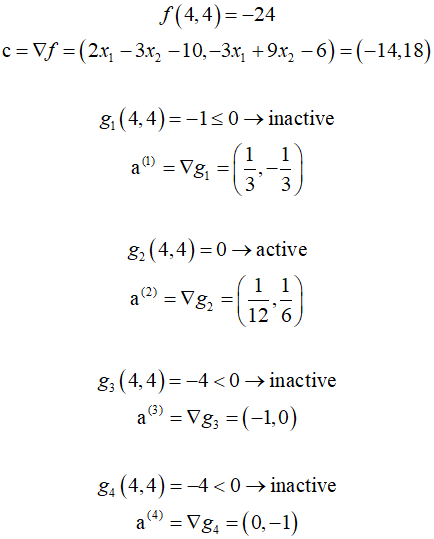
Identifying the $\varepsilon $-active constraints, we find that only ${g_2}$ is active, and the rest are inactive. Without using the potential constraint strategy, the QP subprovblem can be defined as follows.
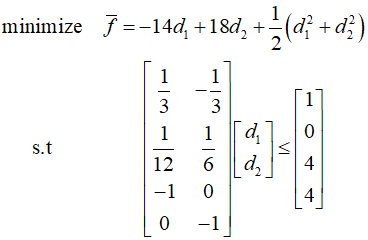
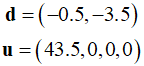
Using the KKT necessary conditions, it can be found as follows.
When using the potential constraint strategy, ${I_k}=2$ is defined, meaning only the second constraint needs to be considered when defining the QP subproblem. Therefore, using this, the QP subproblem can be defined as follows.
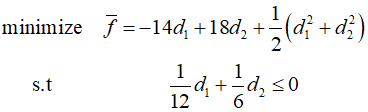
Using the KKT necessary conditions, it can be found as follows.
Therefore, it can be observed that the search directions determined by the two subproblems are significantly different. Moreover,the path to the optimum solution and the computation time will also vary.
'Optimization Technique' 카테고리의 다른 글
| 129_Optimality Conditions (0) | 2024.04.07 |
|---|---|
| 128_Step Size in the Steepest-Descent Method (0) | 2024.04.06 |
| 126_Potential Constraint Set (0) | 2024.04.04 |
| 125_Linearized Subproblem (0) | 2024.04.03 |
| 124_Linearization (0) | 2024.04.02 |